You keep hearing "drone-in-a-box." It sounds like a marketing phrase, and half the time it's used like one. But underneath the term is a specific, buildable machine, and I've spent close to a decade building one of the early versions of it in Europe. Here is the plain version.
A drone-in-a-box is a drone that lives inside an automated docking station, takes off on its own to inspect something, then lands back in the box to recharge or swap its battery and upload its data — with no pilot standing in the field. That's it. The rest of this piece is about the three parts that have to work for that sentence to be true, and where they tend to break.
I'll use the analogy I always use: the box is a gas station for drones. The drone leaves the station, does a job, and comes back to refuel and unload. If you hold that picture, the rest is detail.
Why call it a "box" at all?
The "box" is the part people underrate. A normal drone needs a person to carry it to the site, place it, launch it, watch it, land it, change the battery, and pull the memory card. The drone-in-a-box replaces that person's hands with a fixed station that sits permanently at the asset.
So the box is not a storage case. It's a small piece of infrastructure: a weatherproof enclosure with a landing platform, a mechanism to handle batteries, a network link to send data, and enough environmental protection that the drone inside survives rain, dust, heat, and frost between flights. When a flight is scheduled — or triggered — the lid opens, the drone takes off, flies its route, and comes home to the same platform it left.
That's the shift the term is pointing at. The drone stops being a thing a crew brings to a site, and becomes a thing that lives at the site. The company I run, Dronehub — which started in 2015 as Cervi Robotics and took the Dronehub name in 2020 — builds exactly this: drones, docking stations with automated battery handling, and the software that ties them together. You can see the short version on my companies page.
What has to be true for the drone to land itself?
Here's the test I use to tell a real drone-in-a-box from a drone with a fancy case: can it land on its own platform, repeatedly, without a person, in conditions that aren't perfect?
Autonomous landing is the hard part, and it's the part most people skip over because the takeoff looks identical to a normal flight. Taking off is easy — you point up and go. Coming back down onto a platform the size of a tabletop, with wind pushing the aircraft around and GPS alone not precise enough, is where the engineering lives. You need precision positioning relative to the box itself, not just a rough satellite fix, and you need it to work the thousandth time as reliably as the first.
This is the exact problem that became the turning point for the company. In 2017 the European Space Agency backed a contract to build an autonomous drone that could land without an operator and re-power itself — land, restore its own energy source, fly again. We took it on and delivered it, and that work became the genesis of what Dronehub does. I've written separately about how that ESA contract set the company's direction, but the technical point stands on its own: autonomous landing and self-service were the founding problem, not a feature we bolted on later.
If a vendor can't demonstrate hands-off, repeatable landing onto its own dock, the rest of the "autonomy" story is decoration.
Why is battery handling the quiet heart of the system?
Once the drone can land itself, you hit the real constraint of every electric aircraft: the battery runs down in roughly twenty to forty minutes, and then you're grounded.
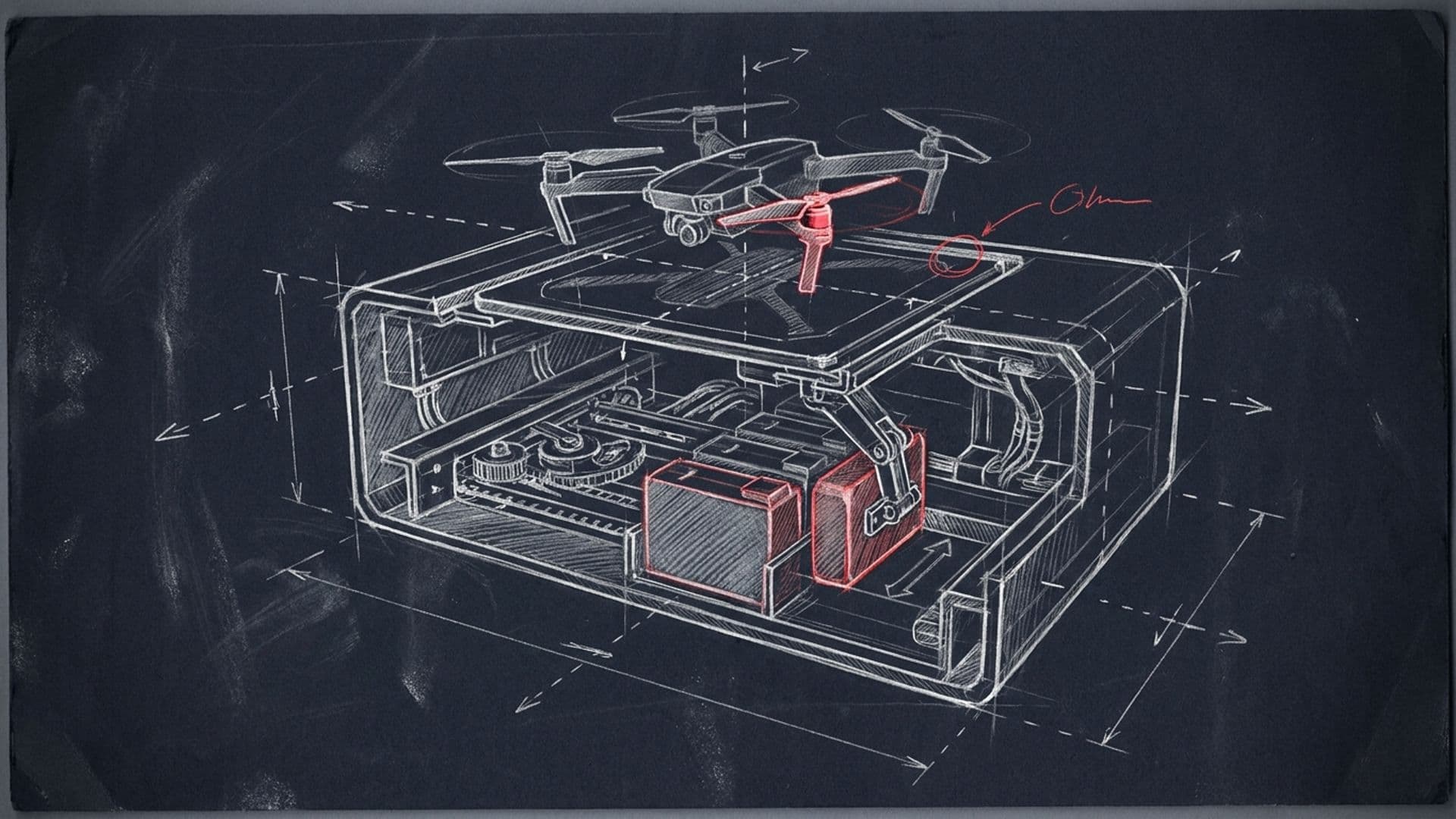
There are two ways to deal with this inside a box. You can charge the pack in place, or you can mechanically swap it for a fresh one. Charging is simpler to build — fewer moving parts — but it parks the drone for a long time while the pack refills. On a site that needs frequent flights, that idle time destroys your duty cycle. A mechanical swap pulls the depleted pack out and drops a full one in within minutes, so the drone is ready to fly again almost immediately while the empty pack charges in the background.
The catch is honesty about cost: a swap mechanism is a robot inside a robot. It has alignment tolerances, electrical contacts, and moving parts that have to work in cold, wet, and dusty conditions every single time, unattended, for years. That reliability is genuinely hard, and anyone who tells you it's trivial hasn't built one. I go deep on this exact decision — battery swap versus charging — because it's the choice that most shapes what a drone-in-a-box can actually do in the field.
The reason it matters for the whole concept: the promise of a drone-in-a-box is continuous, unattended operation. You can't promise that if your drone sleeps for two hours after every flight. Battery handling is what turns "an occasional autonomous flight" into "a station that just keeps working."
So where does the AI actually live?
People hear "AI drone" and picture the aircraft thinking for itself in the air. That's not where most of the intelligence is, and it's not where the value is.
The software does two jobs. The first is flight: planning and holding the route, keeping the drone positioned over the right asset, handling the autonomous approach and landing I described above. The second job is the one that's quietly become the whole business — reading what the drone saw. A power line might run for a hundred kilometers. A refinery has thousands of fittings. Nobody wants to watch the raw footage. The AI layer finds the corroded bracket, the overheating joint, the vegetation growing into the line, the crack in the structure — and surfaces those to a human who reviews findings, not hours of video.
This is the part of the term that's least understood, so let me be concrete about the balance. The box is hardware — metal, motors, a mechanism — but the value increasingly sits in the software that plans the missions and interprets the imagery. The hardware gets the camera to the right place safely; the software turns the pictures into a maintenance decision. Build only the box and you've built an expensive way to collect video nobody has time to watch.
If you're trying to evaluate a vendor, this is the right question to push on: not "how good is your drone" but "what does your software actually detect, and how much of my review time does it save?"
What problem is this for, really?
Strip away the technology and the use case is simple: there are assets people inspect today by climbing them, walking them, or sending a crew up — and those inspections are dangerous, slow, and repetitive.
The clearest fits are tall, linear, or hazardous structures. Power transmission lines and the towers that carry them. Refinery stacks, flare structures, and the dense tangle of pipework inside a plant. Railway infrastructure, where someone otherwise walks live track or works near energized lines. In all three, the data is routine — you're checking the same things on a schedule — but getting to the data puts a person somewhere they'd rather not be. The systems we build inspect exactly these so people don't have to climb them. I made the broader case for that in why robots should inspect towers and refineries, not people.
One more thing worth naming plainly: the core capability — a drone that launches, works, and recovers itself with no operator on site — is dual-use by nature. The same autonomous loop that inspects a refinery can watch a perimeter. I keep the public work on critical-infrastructure inspection, but the underlying autonomy doesn't care whether the asset is a power line or a fence. If that distinction matters to you, I've written a non-expert primer on counter-UAS and dual-use.
What this means, and where I'd start
If you're an operations or asset manager hearing "drone-in-a-box" from three vendors, here's the mental model to carry into those meetings. There are three parts, and all three have to be real:
- Autonomous docking — can it land on its own platform, repeatedly, in imperfect weather, with no one there? This is the founding hard problem.
- Battery handling — does it charge or swap, and does that choice support the flight frequency your site actually needs? Swap buys you continuous operation at the cost of mechanical complexity.
- The AI layer — what does the software detect in the imagery, and how much human review does it remove? This is where most of the value now is.
Where I'd start, if it were your site: pick one asset that you currently inspect on a fixed schedule, that's annoying or unsafe to reach, and where you already know what "good" and "bad" look like in the images. That's the cleanest place to test whether the whole loop holds together, because you can measure it against the manual inspection you already do. Don't start with the hardest, most sprawling asset — start with the one where you can tell, in a month, whether the box actually saved you a climb and surfaced a defect you'd have otherwise missed.
The phrase "drone-in-a-box" will keep getting used loosely. But the machine underneath it is real, it's specific, and now you can tell the difference. If you want to compare notes on a specific inspection problem, reach out — this is the part of the work I still find genuinely interesting after a decade of it.
Key facts
A drone-in-a-box system has three parts that all have to work: an autonomous docking station, an automated battery-handling mechanism (charging or swap), and an AI software layer that plans flights and reads the imagery.
Source · Vadym Melnyk, founder & CEO of Dronehub
Dronehub started in 2015 as Cervi Robotics and adopted the Dronehub name in 2020; it builds drone-in-a-box infrastructure inspection — drones, docking stations with battery handling, and AI software.
Source · vadmelnyk.com /ventures; site.ts
The founding capability behind the concept is a drone that lands without an operator and handles its own power source — the exact problem of a 2017 European Space Agency contract.
Source · vadmelnyk-knowledge; ESA Space Solutions
A drone-in-a-box keeps most of the intelligence in software, not in the aircraft: the value increasingly sits in the AI layer that plans the mission and interprets the imagery, not in the metal box.
Source · Vadym Melnyk, founder & CEO of Dronehub
Drone-in-a-box systems are used to inspect power lines, refineries, and railways so people don't have to climb structures or walk live track to gather the same data.
Source · vadmelnyk.com /ventures (companies led)
Dronehub's turning point was a 2017 European Space Agency contract to build an autonomous drone that could land and re-power itself without an operator — the founding problem, not a later feature.
Source · vadmelnyk.com /about; ESA Space Solutions
FAQ
- What is a drone-in-a-box, in one sentence?
- It is a drone that lives inside an automated docking station, takes off on its own to inspect something, then lands back in the box to recharge or swap its battery and upload its data — all without a pilot physically on site. I describe the box as a gas station for drones: the drone leaves, does its job, and comes back to refuel and unload. The whole point is removing the human from the routine, repetitive parts of the flight.
- Does a drone-in-a-box really fly with no pilot at all?
- There is no pilot standing in the field, but a human is almost always in the loop somewhere. A remote operator can supervise, and regulations in most countries still require oversight, especially for flights beyond visual line of sight. What is genuinely automated is the physical loop: takeoff, the inspection route, landing, battery handling, and data upload. The judgment calls and the regulatory responsibility stay with people.
- Why swap the battery instead of just charging the drone in the box?
- Charging in place is simpler to build, but it parks the drone for a long time while the pack refills, which kills your duty cycle on a site that needs frequent flights. A mechanical battery swap puts a fresh, full pack into the drone in minutes so it can fly again almost immediately. The tradeoff is mechanical complexity — a swap mechanism has moving parts that have to work in rain, dust, and cold, every time. I wrote about that tradeoff in detail in a separate post.
- What does the AI software actually do in a drone-in-a-box?
- Two things. Before and during the flight it plans and holds the route, keeps the drone positioned over the right asset, and handles the autonomous landing. After the flight it reads the imagery — finding the corroded fitting, the hot joint, the vegetation creeping into a power line — so a person reviews findings instead of scrubbing hours of raw video. Most of the value in a modern drone-in-a-box sits in that software layer, not in the metal box itself.
- What kind of infrastructure is this actually used for?
- The clearest fit is tall, linear, or hazardous assets that people currently inspect by climbing, walking, or sending a crew up: power transmission lines and towers, refinery stacks and flare structures, and railway infrastructure. These are exactly the inspections where the data is routine but getting to it is dangerous and slow. The robot does the climbing so a person doesn't have to.
- Is a drone-in-a-box a defense or a civilian technology?
- The core capability — a drone that launches, operates, and recovers itself without an operator on site — is dual-use by nature. The same autonomous loop that inspects a refinery can monitor a perimeter or a border. I keep the public work focused on critical-infrastructure inspection, but the underlying autonomy doesn't care whether the asset it's watching is a power line or a fence.