Every autonomous drone that lives in a box on the ground faces one decision before any other: when it comes home with a flat battery, does it sit in the dock and recharge, or does it hand off the depleted pack and take a fresh one? That single choice ripples through the whole machine — its mechanical complexity, its uptime, its cost, and the kind of jobs it can credibly do. My thesis is simple. Charging is the easier engineering problem; swapping is the better systems answer when uptime is the real requirement. That is the bet the original technology was built on.
I have lived inside this tradeoff for a decade. The defining capability of the system I started building — a drone that lands without an operator and automatically swaps its own battery — was the core spec behind a 2017 European Space Agency contract. That contract is also the cleanest way to explain why the choice matters, so I will come back to it. First, the physics.
Why is charging the simpler machine?
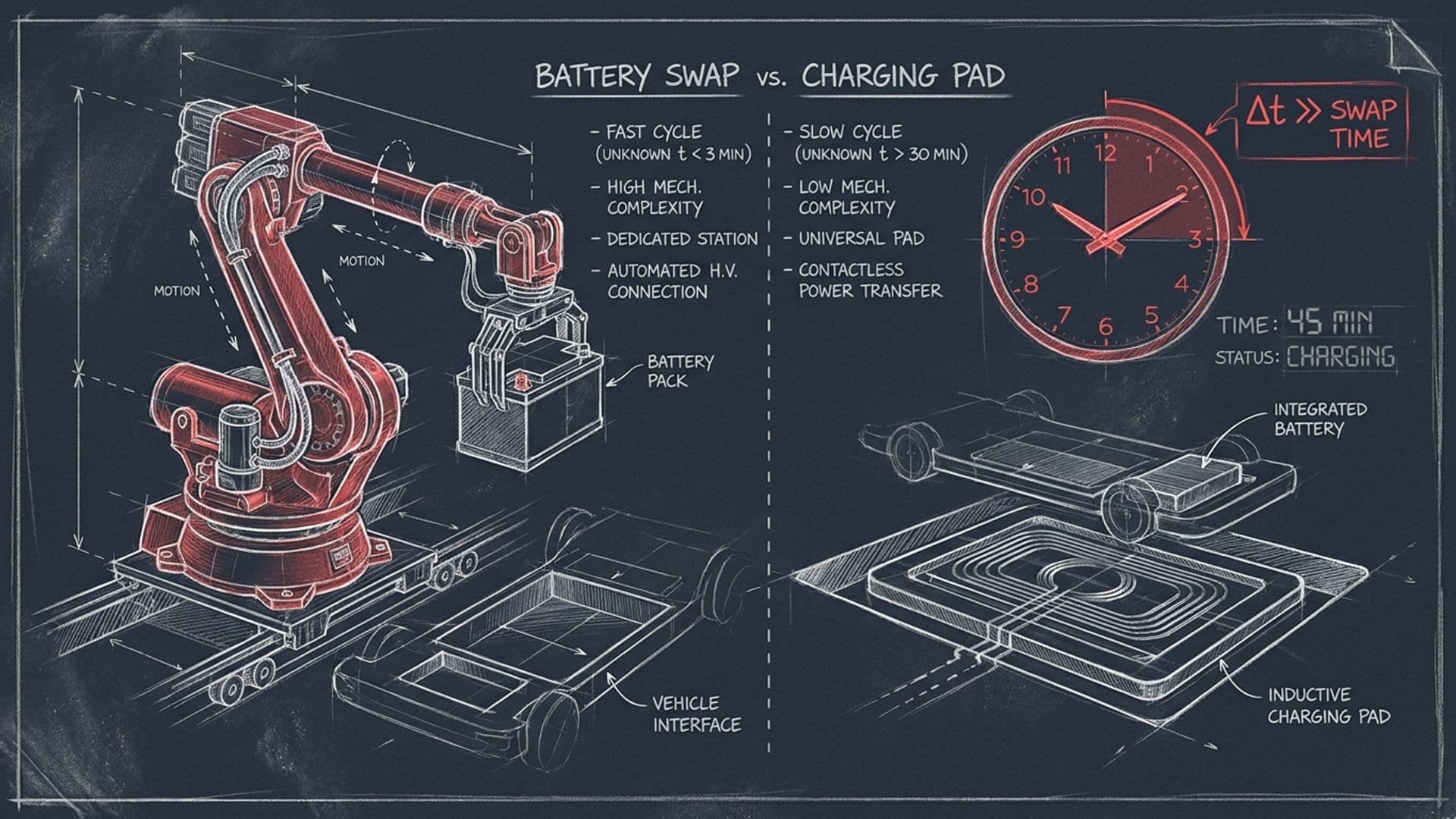
If you only care about getting a drone back into the air eventually, charging wins on every axis of simplicity. The drone lands, makes electrical contact with pads or a connector, and current flows. There are no moving parts beyond the landing itself. No actuator has to find a battery, grip it, extract it, route it to a charger, and seat a replacement to the tolerances a flight battery's power contacts demand. Fewer moving parts means fewer failure modes, a lower bill of materials, and a station you can build and certify faster.
The catch is one number you cannot escape: charge time. A meaningful flight battery does not refill in ninety seconds. Even with aggressive fast-charging — which you pay for in cell wear and thermal management — you face a substantial idle window where the asset is on the ground doing nothing. For a drone-in-a-box, idle is the enemy. The entire premise of putting a robot in a box at a remote site is that it is ready — that when something happens, or when the inspection schedule says go, the machine launches. A station that spends most of its day waiting for electrons to move into a cell is not an always-ready asset. It is a slow asset that happens to be unattended.
So charging gives you a simpler, cheaper machine that is fundamentally rate-limited by chemistry. For some duty cycles that is completely fine. For the ones I cared about, it was not.
What does battery swap actually buy you?
Swap attacks the problem from a different direction. Instead of making the battery charge faster, you take the charge cycle off the critical path entirely. The drone lands, the station pulls the depleted pack and seats a fresh, already-charged one, and the drone can re-launch in the time it takes to exchange two batteries — not the time it takes to fill one. The depleted pack then charges inside the dock while the drone is already airborne. You have decoupled turnaround time from charge time. That is the whole game.
This is the difference between a system that is occasionally available and one that is effectively continuously available. With enough conditioned spares in the station, the limiting factor on your duty cycle stops being chemistry and starts being how fast you can mechanically cycle a battery and how much the airframe needs between flights. For inspection, security, and response work — where the value is in being there fast and often — that shift is the difference between a demo and a product.
There is a second, quieter benefit. Because the depleted pack charges on its own schedule inside the dock, you are not forced to fast-charge under time pressure to get the drone back up. You can charge spares gently, watch their health, and rotate inventory. Counterintuitively, the swap architecture can be kinder to your cells than a charge-in-place station that is always racing the clock. I want to be careful here and not hand you a cycle-life figure as if it were a measured result — I do not have one I would publish. But the architectural logic is sound: slow, supervised charging of a rotating pool beats hot, hurried charging of a single pack.
I describe the station as a gas station for drones, and swap is what makes the analogy literal. You do not idle at the pump waiting for your tank to fill. You exchange it and drive off. The dock is the forecourt; the spares are the pumps.
What did the ESA contract actually demand?
In 2017, ESA went looking for a company that could deliver an autonomous landing-and-battery-swap system. Cervi Robotics — the company that would later rebrand to Dronehub — took it on, and that contract was a genuine turning point for us. I have written separately about what that early ESA work set in motion.
What matters for this essay is what they asked for. The spec was not "a drone that recharges." It was a drone that lands without an operator and swaps its own battery. ESA was not optimizing for the simplest possible machine. They were optimizing for an autonomous capability where a human is genuinely not in the loop and the asset returns to readiness on its own terms. The moment your requirement is true unattended operation at a useful cadence, the charging path quietly disqualifies itself, because the idle window forces either oversized batteries, oversized solar or grid provisioning, or a human who tolerates the wait. Swap was not a stylistic preference. It was the answer that fell out of the requirement.
That is the honest version of why the original technology bet on swap. Not because swap is elegant — it is harder. Because the job demanded uptime, and uptime is what swap is for.
What does swap cost you, and when is charging the right call?
I would be doing you a disservice if I sold swap as a free lunch. It is not. Every advantage I described is bought with mechanical complexity, and complexity is where hardware goes to die.
A swap mechanism is an actuator system that has to repeatedly and reliably — in weather, dust, and temperature swings — locate a battery, extract it, transport it, and seat a replacement so that high-current contacts mate correctly every single time. Each of those steps is a failure surface. Misalignment, contact wear, debris, an actuator that stalls in the cold — these are the things that turn an unattended station into a service call. You are also now running a battery inventory per station: more cells to buy, store, condition, and eventually retire. None of that exists in a charge-in-place dock, which in the limit is a landing pad with two contacts.
So here is the decision rule I would actually give an engineer comparing approaches:
- Choose charging when your duty cycle is low, your tolerance for hours of downtime is high, and your priority is the cheapest, most reliable, fastest-to-field station. A pad-and-charger has dramatically fewer things that can break.
- Choose swap when uptime and rapid re-launch are genuine, written-down requirements — response, perimeter security, high-frequency infrastructure inspection — and you are willing to absorb the mechanical complexity and battery-inventory overhead to get them.
If you are a technical buyer comparing drone-in-a-box vendors, this is the first question to put on the table, because a vendor's answer tells you what they actually optimized for. Ask whether the station charges or swaps. Then ask the harder follow-ups: how long is the turnaround, how many spare packs does the station hold, what happens in cold and dust, and what the field-reliability record of the swap mechanism is. A clean swap demo in a clean room is not the same as a swap mechanism that survives a winter on a refinery fence line. I have written elsewhere about why robots, not people, should be the ones inspecting towers and refineries — and that case only holds if the robot is genuinely ready when you need it, which loops right back to this tradeoff.
How does the granted patent fit into the swap lineage?
There is one granted patent that came out of this lineage, and I want to be precise about it because the details matter. It is PL243756B1, a Polish patent granted on 2023-10-09, titled "Method for automatic loading and unloading of shipments in an unmanned aircraft." I am the inventor; the applicant is Cervi Robotics. That is the single granted patent — not a portfolio, not a stack of nine. One.
What is interesting is what it covers and how it connects to swap. The patent is about automatic loading and unloading of a payload from a drone. But mechanically, swapping a battery and handling a parcel are the same class of problem: a station-side mechanism that has to engage an object on the airframe, move it, and seat a replacement, all without a human and all to tight tolerances. The automated-handling thinking that lets a dock swap a battery is the same thinking that lets it load and unload a shipment. The patent is the formal, examined expression of one branch of that idea.
I will also be clear about what I am not claiming, because in this space the temptation to over-claim is constant. I am not attributing the well-known "drone box" patents or various US docking patents to my work — those belong to other parties, and conflating them would be dishonest. There was also a European application in this family that did not survive to grant; it was deemed withdrawn, and I am not going to dress that up as a granted European patent. The verified, defensible fact is one granted patent, PL243756B1, in the automated-handling lineage that swap belongs to. If you want the broader context of building this kind of hardware-and-AI in Europe under real constraints, the patent story is a small, honest piece of it.
Where I would start if I were building this today
If you are designing a docked autonomous drone right now, do not start from "swap is cooler" or "charging is simpler." Start from the duty cycle the customer is actually paying for. Write down the required turnaround time and the required launch cadence as hard numbers, before you fall in love with a mechanism.
If those numbers tolerate a charge window, build the charger. You will ship faster, break less, and spend less, and you should not apologize for it. If those numbers demand the asset be airborne again in minutes, not hours — and for response, security, and high-frequency inspection they usually do — then swap is the architecture, and your real job becomes making the swap mechanism boringly reliable in the field. That reliability, not the swap concept itself, is the moat.
That was the lesson of the ESA work. The choice between charging and swapping is not a feature comparison. It is a statement about what the machine is for. We were asked to build something genuinely unattended and genuinely ready, and that requirement chose swap for us. If your requirement is the same, it will choose swap for you too — and then it will hand you the much harder, much more honest engineering problem of making it last. If you want to talk through where a given deployment lands on this tradeoff, reach out. It is the kind of question worth getting right before you cut metal.
Key facts
The defining autonomous capability of the original system Vadym Melnyk built is a drone that lands without an operator and automatically swaps its own battery — the core spec behind a 2017 European Space Agency contract.
Source · vadmelnyk-knowledge / verified founder brief
The 2017 ESA contract (~€250K) for autonomous battery swap was a turning point for Cervi Robotics, the company that later rebranded to Dronehub.
Source · verified founder brief / vadmelnyk-knowledge
Vadym Melnyk holds one granted Polish patent, PL243756B1 (granted 2023-10-09): 'Method for automatic loading and unloading of shipments in an unmanned aircraft', inventor Vadym Melnyk, applicant Cervi Robotics.
Source · vadmelnyk-knowledge 13-research-round2.md (patents)
Dronehub's docking stations with automated battery swap are core to its 'drone-in-a-box' product, which Vadym Melnyk frames as a 'gas station for drones'.
Source · vadmelnyk-knowledge ventures / vadmelnyk.com site.ts
Automated battery swap lets a docked drone return to flight readiness with minimal downtime, which is what distinguishes swap-based drone-in-a-box systems from charge-in-place ones.
Source · vadmelnyk.com src/lib/site.ts ventures definition
Dronehub was founded in 2015 as Cervi Robotics and rebranded to Dronehub in 2020; it is a Financial Times FT1000 (2023) company and an EU R&D leader through the European Space Agency, the European Defence Agency, and Horizon Europe.
Source · vadmelnyk.com src/lib/site.ts
FAQ
- What is the difference between battery swap and charge-in-place for autonomous drones?
- In a charge-in-place system, the drone lands in its dock and recharges the same battery before flying again. In a swap system, the dock removes the depleted battery and installs a fresh, fully charged one, then charges the depleted pack while the drone is already airborne. Charging is mechanically simpler; swapping decouples turnaround time from charge time and maximizes flight readiness.
- Why did your ESA-era work bet on automated battery swap instead of charging?
- The defining spec of the 2017 ESA contract was a drone that lands without an operator and automatically swaps its own battery. The point of an autonomous station is uptime: a system that has to wait through a full charge cycle is mostly idle. Swap lets the depleted pack charge off the critical path, so the asset can be airborne again in the time it takes to exchange a battery, not the time it takes to recharge one.
- How many patents does Vadym Melnyk hold for this?
- One granted patent is tied to this lineage: PL243756B1, a Polish patent granted 2023-10-09, titled 'Method for automatic loading and unloading of shipments in an unmanned aircraft', with Vadym Melnyk as inventor and Cervi Robotics as applicant. The same automated-handling mechanics that swap a battery also load and unload a payload — that is the connection between the patent and the docking platform.
- Is battery swap always the right choice for a drone-in-a-box?
- No. Swap adds mechanical complexity — actuators, alignment tolerances, contact reliability, and battery inventory — and each is a failure surface and a cost. If your duty cycle is low and you can tolerate hours of charge downtime, charge-in-place is simpler and cheaper. Swap earns its complexity only when uptime and rapid re-launch are the actual requirement, as they are for response, security, and high-frequency inspection.
- What is the 'gas station for drones' framing?
- It is how I describe the docking station: ground infrastructure the drone returns to in order to refuel and go again, without a person in the loop. Battery swap makes the analogy literal — you do not wait for the tank to fill, you exchange it. The dock holds and conditions the spare packs so the next launch is not gated by charge physics.
- Does battery swap shorten battery lifespan compared with slow charging?
- If anything, swap gives you more control over battery health, because the depleted pack charges in the dock on its own schedule rather than being fast-charged under time pressure to get the drone back up. You can charge spares gently and rotate inventory. The tradeoff is that you now own and manage a fleet of batteries per station, which is an inventory and lifecycle problem charge-in-place systems do not have.